Volar sin estrés ayudado por la electrónica de un esbilizador de vuelo
página(s) : 3/5
Conexiones del receptor FlySky al
estabilizador de vuelo Orange RX3 V2

A la vez, conecto tres servos estandar en las salidas del
estabilizador:
- Salida del estabilizador AIL-L, al servo que sería el de alerones
- Salida del estabilizador ELEV, al servo que sería el del timón de
profundidad
- Salida del estabilizador RUDD, al servo que sería el del timón de
dirección
En cuanto a los estados del diminuto conmutador DIL de configuración,
siempre comenzando por el situado más arriba, sus funciones respectivas
son:
- 1º (Izquierda) estabilizador activado (por entrada AUX) - (Derecha)
estabilizador desactivado (por entrada AUX).
- 2º (Izquierda) servo de dirección en reverse - (Derecha) servo de
dirección normal
- 3º (Izquierda) servo de profundidad en reverse - (Derecha) servo de
profundidad en normal
- 4º (Izquierda) servo de alerones en reverse - (Derecha) servo de
alerones en normal
- 5º (Izquierda) cola en V activada - (Derecha) cola en V desactivada
- 6º (Izquierda) ala en Delta activada - (Derecha) ala en Delta
desactivada
En este caso, como el montaje sería hipoteticamente el de un avión
normal, colocaríamos el 1º a izquierda y dejaríamos el resto a derecha.
Naturalmente, en un avión real además deberíamos tener en cuenta el
sentido de los servos para que la estabilización del módulo se
efectuara en sentido correcto, lo cual notaríamos, porque al mover el
avión en tierra, los planos deberían reaccionar en contra del
movimiento efectuado.
Conmutador DIL de configuración del
Orange

El montaje para la prueba es de lo más sencillo. Arrancamos
primeramente el emisor y luego el receptor, observando que en el módulo
Orange se enciende un led rojo. Movemos los sticks del emisor y
observamos que todos ellos efectúan la acción sobre sus
correspondientes servos. Previamente hemos colocado en conmutador del
canal 6, en OFF, con lo cual la función de estabilizador ha de estar
desconectada. En efecto, movemos el estabilizador y ningún servo
reacciona. Ahora activamos la palanca del canal 6 y seguidamente
volvemos a mover el estabilizador, viendo que ahora uno de los servos
responde en consecuencia.
- Al dejar el estabilizador plano sobre la mesa y moverlo en un sentido
de giro, reacciona el servo de RUDD, es decir, del timón de dirección.
- Al inclinar el estabilizador en sentido longitudinal, reacciona el
servo de ELEV, es decir, del timón de profundidad.
- Al inclinar el estabilizador en sentido transversal, reacciona el
servo de AIL-L, es decir, el de alerones.
El montaje para la prueba. Emisor y
receptor FlySky, el estabilizador de vuelo Orange y tres servos para
observar las reacciones

La respuesta de los servos es diferencial con respecto a la posición,
es decir, reaccionan proporcionalmente a la velocidad angular del
movimiento y naturalmente a su sentido, pero cuando ésta cesa vuelven a
su posición central, lo cual indica que la placa contiene giróscopos y
no acelerómetros, los cuales en realidad efectuarían la derivada de la
velocidad y para que se mantuviera la desviación del servo dicha
velocidad debería ser acelerada.
De todas formas, el software que controla el microcontrolador del
estabilizador también parece incluir un poco de respuesta amplificada a
los movimientos más bruscos, que sin duda obtiene "derivando" la señal
de los giróscopos.
Otra cuestión es la forma de instalar el estabilizador en el avión. Su
manual especifica que esté colocado en posición horizontal y con los
conectores en el sentido de la marcha del avión, pero después de
efectuar algunas pruebas veo que al estabilizador le es indistinto el
plano a controlar. Es decir, también podemos montarlo en otras
posiciones, aunque luego deberemos tener en cuenta que las entradas y
salidas corresponden a un plano distinto y que posiblemente ya no
funcionarán las opciones de V-Tail y de ala en Delta.
En todo caso, como la posibilidad de otras opciones de montaje las
considero interesantes para aviones normales en los que a veces no
sobra espacio, cuando tenga un momento realizaré algunas pruebas con
más calma.
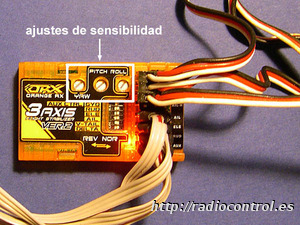
En el anterior mensaje me olvidé de comentar los ajustes de
sensibilidad situados en la parte superior, así como las
configuraciones de V-Tail (cola en V) y alas tipo Delta. Comenzando por
los ajustes diré que tiene la forma de un pequeño potenciómetro
analógico que podemos girar con un destornillador de punta fina. Dichos
ajustes son tres, y vistos de izquierda a derecha:
YAW, significa "guiñada" y
afecta a la sensibilidad del giroscopio de dirección, y por tanto a la
salida RUDD (servo del timón de dirección)
PITCH, significa "inclinación"
y afecta a giroscopio de cabeceo, y por tanto a la salida ELEV (servo
del timón de profundidad)
ROLL, significa "enrollar" y
afecta al giroscopio de balanceo, y por tanto a la salida AIL-L (servo
de alerones)
Potenciómetros de regulación de
sensibilidad de los tres giróscopos
Al comprobar la acción de dichos ajustes veo que son algo
exponenciales, es decir, si los colocamos al 50%, el movimiento de los
servos, con la misma excitación no llega al 50% de si el ajuste está al
100%. De hecho diría que está sobre el 30%. El hecho que sea
exponencial nos permite ajustar mejor para aviones que precisan
pequeñas correcciones y a la vez que también sirve para los que
necesitan un valor mucho mayor.
Otra cosa. El Orange tiene una sola entrada de señal AIL, es decir, de
alerones, pero en cambio tiene dos salidas, AIL-L y AIL-R. Pues bien,
ambas salidas son iguales excepto por el sentido de giro del servo, de
esta forma podemos comandar aviones en que cada semiala tenga su propio
servo, aunque esto nos impediría utilizar funciones especiales de
algunos emisores como los flaperones (alerones operando como mezcla de
alerones y flaps)
Los movimientos de las salidas AIL-L y AIL-R siempre guardarán la misma
relación entre sí, con independencia de que activemos las funciones
especiales del estabilizador Orange que vienen a continuación, la cola
en V (V-Tail) y el ala en Delta.
==============================================

