Emisión y recepción en PPM-PCM ¿ Que es lo mejor ?
Foro Picayzumba 28 de Julio de 2.005
La respuestas son de nuestro colega "Despista2"
a preguntas de "Aegea"
=======================================
Futaba 6Exa/6Exap PCM PPM y otras dudas para
Despista2
Por defecto intuyo que emitirá en FM (PCM???).
Pero si es así porque me funciona con el receptor "normal" HITEC
de la CODE4 de ALtaya????
Si te funciona con el receptor PPM es porque esta configurada por
defecto para emitir en PPM, es lo normal salvo que viniese con un
receptor PCM de serie. Supongo que debes tener algun menu que se
llame "modulation" o algo parecido en el que podras cambiar entre
PPM y PCM.
Cita:
¿Que ventajas tengo de FM(PCM) a PPM?
Espera que le saque punta al lapiz, que esta es larga...
Voy a intentar primero explicarte que son PCM y PPM. Lo de FM es
el tipo de modulacion, y en tu caso siempre va a ser la misma ya
que no puedes cambiar a AM. PCM y PPM son metodos de codificacion,
es decir, el "lenguaje" en el que se escribe sobre la
portadora (señal de radio) la informacion sobre la posicion
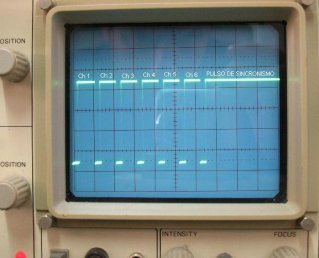
de cada servo. El PPM (Pulse Position
Modulation) es un sistema analogico que tiene ya unos 40 años y
fue desarrollado por la NASA. La informacion se codifica en forma
de tren de impulsos en el que hay tantos impulsos como canales,
mas un impulso ancho de sincronismo que resetea al receptor y lo
prepara para recibir el siguiente tren. Cada impulso de canal puede
tener una duracion de entre 1 y 2 milisegundos, coincidiendo esas
duraciones con los extremos del recorrido del servo, y una duracion
de 1,5 mS indca que el servo de ese canal debe
estar en su punto medio (este es el sistema standard pero puede
variar segun la marca del equipo. Por ejemplo en el caso de Futaba
el punto medio coincide con 1,52mS y en el caso de Multiplex corresponde
a 1,6mS). En este sistema el receptor es "tonto" y se limita a convertir
ese tren de impulsos en impulsos separados para los distintos servos;
esto lo hace un componente electronico llamado "registro de desplazamiento",
que tiene una patilla de entrada por la que le llega el tren, y
tantas patillas de salida como canales tengamos, y se encarga de
mandar el 1º pulso al canal nº1, el 2º pulso al canal nº2... y cuando
le llega el impulso de sincronismo se resetea y espera al siguiente
tren. Luego es el circuito controlador del servo el que se encarga
de convertir ese pulso de anchura variable en una variacion de la
posicion del brazo. Este
sistema tiene una ventaja y un inconveniente: La ventaja es que
todo el proceso es muy rapido, asi que mandamos informacion de la
posicion de cada servo unas 50 veces por segundo. El inconveniente
es que es muy vulnerable a las interferencias... Si se nos introduce
un pulso de ruido en un tren de impulsos, por ejemplo entre los
canales 2 y 3, los dos primeros canales serian correctos, al 3º
canal le mandariamos el pulso de ruido, y el resto de canales los
mandariamos desplazados (al servo 4 le mandariamos la informacion
del 3º canal, al servo 5 le mandariamos la informacion del 4º canal...
y asi sucesivamente). Una fraccion de segundo despues llega un tren
de impulsos valido y todos los servos vuelven a su posicion correcta.
Te dejo que vayas digiriendo esto y esta tarde-noche sigo con el
sistema PCM, que ya tengo a la familia tirandome de las orejas para
que me ponga el bañador y les lleve a la playa
Salu2...
... Seguimos para bingo.
El sistema PCM (Pulse Code Modulation) es digital, y se viene usando
desde hace unos 30 años en sistemas de telecomunicaciones
y en audio digital. En el caso que nos ocupa el microprocesador
de la radio hace un muestreo de las tensiones proporcionadas por
los potenciometros de los sticks y convierte esas tensiones analogicas
en numeros binarios mediante un ADC (Analogic - Digital Conveter).
Estas "palabras" digitales que indican la posicion que
debe tener cada servo se procesan para formar un "frame"
(trama), que es como una frase digital en la que se indica la posicion
de todos los canales con la adicion de un CRC (Cyclic Redundancy
Code). Este CRC es de suma importancia, porque en el radica toda
la seguridad del sistema; es el checksum obtenido de realizar una
operacion matematica con toda la frase binaria que enviamos al receptor.
En este caso el receptor no es "tonto", sino que tiene
tambien un microprocesador que recibe el frame, le realiza la misma
operacion matematica que el emisor y compara el checksum obtenido
con el CRC recibido. Si ambos coinciden eso quiere decir que la
señal recibida es valida; en este caso se utiliza cada palabra
de la frase digital para generar un impulso de anchura variable
que se envia al servo correspondiente. Si el checksum obtenido no
coincide con el CRC recibido eso quiere decir que la señal
se ha corrompido por el camino por culpa de alguna interferencia;
en este caso se sigue enviando a los servos la ultima señal
valida recibida. Si la interferencia es corta (lo que normalmente
se llama "glitch") ni nos daremos cuenta de que la hemos
tenido, porque el siguiente frame que llega sera valido y se enviara
a los servos. Si la interferencia es permanente (por ejemplo porque
alguien ha encendido una radio en nuestra misma frecuencia, o incluso
porque se nos ha gastado la bateria de la emisora) podemos programar
al receptor para que siga mandando la ultima señal valida,
o podemos optar por programar un "fail safe", que consiste
en llevar los servos a una posicion predeterminada; en el caso de
un coche se corta el motor, en el caso de un avion se suele dejar
el motor a ralenti y se llevan las superficies de mando al punto
medio, en el caso de un heli se le intenta llevar a vuelo estacionario...
La ventaja del sistema salta a la vista, pero tambien hay inconvenientes...
El mas importante de ellos es el retardo: Los frames que enviamos
son mucho mas largos que los trenes de impulsos que se envian en
el sistema PPM, asi que el sistema es mas lento, y en algunas disciplinas
"adrenalinicas" se puede llegar a notar el retardo entre
la orden enviada y la respuesta del modelo. Cada fabricante busca
formas de minimizar este problema; por ejemplo hay codigos PCM en
los que en un frame enviamos posicion absoluta de los canales pares
y diferencia de los impares, y en el siguiente frame enviamos diferencia
de los pares y posicion absoluta de los impares... De esta forma
(y otras parecidas) conseguimos "raspar" milisegundos
para hacer mas rapido al sistema, aunque actualmente es imposible
llegar a la agilidad de respuesta del PPM.
Voy a parar un rato para la cena y en el siguiente post seguimos
con las dudas una vez explicados los conceptos de PPM y PCM.
Salu2...
P.D.: Dices tu que escribes ladrillos, pero anda que los mios...
... Bueno, creo que ya tenemos suficiente base para responder
a esta pregunta... :
¿Que ventajas tengo de FM(PCM) a PPM?
Como habras visto el sistema PCM cuenta con una ventaja fundamental:
Una absoluta inmunidad contra las interferencias; pero no nos llamemos
a engaño, no es la panacea universal. En el caso de una perdida
de señal del emisor o una interferencia muy prolongada el receptor
(en el que recae practicamente toda la seguridad del sistema) entrara
en modo "fail safe" si asi lo hemos programado; esto puede salvarnos
el modelo si se trata de un velero floton, un entrenador basico...
Un modelo en definitiva capaz de recuperar por si solo la condicion
de estabilidad; y cuando tras unos inacabables segundos de nerviosismo
conseguimos que el jilip*¡!@& ese apague la emisora, o milagrosamente
desaparece la interferencia, ahi tendremos a nuestro modelo esperando
a que retomemos el control; pero si acontece esa interferencia larga
mientras hacemos una pasada rasante a cuchillo con un modelo nervioso...
¡No hay fail safe que nos salve! Afortunadamente eso son casos extremos,
y lo normal es que las interferencias sean "glitches" momentaneos
que no llegan a activar el fail safe... Ahi si que es tremendamente
efectiva la seguridad del sistema PCM. Si nos afecta un glitch en
un modelo con receptor PPM podemos notar segun el caso como el motor
tiene un hipo momentaneo, como el modelo nos hace un extraño, da
un "saltito" y luego se recupera. Si son varios glitches seguidos
nos daremos cuenta de que algo raro esta pasando y seguramente acercaremos
el modelo a la senda de planeo y nos prepararemos para aterrizar.
Si esto mismo nos pasa (por ejemplo) mientras hacemos una pasada
rasante en invertido, lo normal es que al primer glitch el modelo
se desparrame por la pista y nos quedemos mirando con cara de bobos
sin saber si acercarnos a recoger las virutas o irnos directamente
a casa. Ahora bien, si estamos emitiendo en PCM probablemente ni
siquiera nos enteraremos de que nos ha afectado un glitch, a menos
que estos sean tan continuados que notemos que el modelo responde
muy lento a los mandos; pero llegados a este extremo con el PPM
ya tendriamos al modelo totalmente fuera de control.
Ultimamente estan apareciendo receptores PPM "inteligentes" que
intentan emular hasta cierto punto la seguridad del sistema PCM
manteniendo casi integramente la agilidad del PPM; es el caso de
los receptores IPD de Multiplex (que incluso ha dejado de fabricar
receptores PCM), los MPD de Jeti, los Schulze, los ultimos receptores
de Webra... En estos receptores se sustituye el registro de desplazamiento
por un microprocesador que analiza el tren de impulsos y desecha
cualquiera en el que haya signos evidentes de interferencia (pulsos
de duracion menor de 1mS ó mayor de 2mS) mandando a los servos la
ultima señal valida, e incluso algunos de estos tienen la posibilidad
de programar un fail safe como los PCM... El problema es que algunos
glitches pueden tener una duracion comprendida entre 1 y 2 mS, en
cuyo caso engañarian al sistema y llegarian a los servos; no obstante
el nivel de seguridad es muchisimo mas alto que en un receptorPPM tradicional y cercano al de un PCM manteniendo una rapidez
de respuesta muy superior a este.
El receptor que trae de serie es PPM?
Creo que el que trae la version normal de esa radio es el R136F,
que es PPM Single Conversion. La ultima cifra indica el numero de
canales, la F significa que es PPM (si fuese una P indicaria PCM)
y la ausencia de una D antes de la F significa que es Single Conversion
(si hubiese una D seria Dual Conversion).
Si cambio la modulación a PPM y el receptor no lo es ¿no
funcionara?
Si tu receptor es PCM y emites en PPM los servos se quedaran quietos
sin hacer caso a la radio. Si tu receptor es PPM y emites en PCM
los servos se volveran locos.
También dice que tiene Fail Safe en PCM.
Bueno... Esa no es una caracteristica de la emisora, sino del receptor.
Como te comente antes la emisora se encarga de poner el CRC en el
frame, y en el receptor recae toda la seguridad del sistema: compara
el checksum con el CRC, decide si el frame es valido o no y actua
en consecuencia.
Espero haberte aclarado un poco el tema.
Salu2...
Muchas gracias como siempre. Ahora tengo más
claro el tema.
Efectivamente el receptor es el R136F y la codificacion
por defecto es PPM.
Hasta aqui todo más o menos bien. Cuando
me hablas de PCM y CRC empezamos a entendernos porque soy Informático
y de CRCs sé un poquito.
En cualquier caso, sólo me queda una duda,
y es....
¿Todos los receptores que no son PCM tienen
que ser por narices PPM? ¿Por que te lo digo? Porque cuando
encendí por primera vez la radio tenía colocado en
el avión el receptor (aquel al que se le rompió la
antena) de HITEC de la emisora de Altaya (que es de gama bajabaja)
y funcionaba perfectamente. ¿Debo por tanto inferir que es
PPM?
Lo comento porque si un receptor PPM es algo que
se salga de lo "normal" me extraña muchísimo
que lo tenga una emisora de gama baja.
Este de hecho fue el origen de todas las dudas,
porque me hubiera cuadrado más que no hubiese funcionado.
Respecto al otro hilo del CG te diré que
voy a atrasar dos o tres cm el motor en la bancada, porque no me
hace ninguna gracia poner las baterías detrás de los
servos.
Aprovecho para desearos unas felices vacaciones
a todos (hoy a las 15.00 hora española me largo 3 semanas).
Leere el foro esporádicamente y la prueba de vuelo de mi
avión esperará probablemente hasta dentro de 1 semana.
Salu2 y buenos vuelos
Efectivamente cualquier receptor que no sea PCM es PPM, es el sistema
que se viene usando desde los comienzos del R/C; en radio control
proporcional no hay mas sistemas. Tu duda puede venir porque PPM
no ha sido tradicionalmente un termino muy usado, ya que todas las
radios lo eran... Podian ser AM o FM pero todas eran PPM. El lio
empieza a formarse cuando aparecen las radios PCM, entonces empieza
a hacerse una distincion entre FM(las PPM de toda la vida) y PCM
(aunque tambien van moduladas en FM ) y ahi es donde comienzan
los lios de siglas.

 El PPM (Pulse Position
Modulation) es un sistema analogico que tiene ya unos 40 años y
fue desarrollado por la NASA. La informacion se codifica en forma
de tren de impulsos en el que hay tantos impulsos como canales,
mas un impulso ancho de sincronismo que resetea al receptor y lo
prepara para recibir el siguiente tren. Cada impulso de canal puede
tener una duracion de entre 1 y 2 milisegundos, coincidiendo esas
duraciones con los extremos del recorrido del servo, y una duracion
de 1,5 mS indca que el servo de ese canal
El PPM (Pulse Position
Modulation) es un sistema analogico que tiene ya unos 40 años y
fue desarrollado por la NASA. La informacion se codifica en forma
de tren de impulsos en el que hay tantos impulsos como canales,
mas un impulso ancho de sincronismo que resetea al receptor y lo
prepara para recibir el siguiente tren. Cada impulso de canal puede
tener una duracion de entre 1 y 2 milisegundos, coincidiendo esas
duraciones con los extremos del recorrido del servo, y una duracion
de 1,5 mS indca que el servo de ese canal  debe
estar en su punto medio (este es el sistema standard pero puede
variar segun la marca del equipo. Por ejemplo en el caso de Futaba
el punto medio coincide con 1,52mS y en el caso de Multiplex corresponde
a 1,6mS). En este sistema el receptor es "tonto" y se limita a convertir
ese tren de impulsos en impulsos separados para los distintos servos;
esto lo hace un componente electronico llamado "registro de desplazamiento",
que tiene una patilla de entrada por la que le llega el tren, y
tantas patillas de salida como canales tengamos, y se encarga de
mandar el 1º pulso al canal nº1, el 2º pulso al canal nº2... y cuando
le llega el impulso de sincronismo se resetea y espera al siguiente
tren. Luego es el circuito controlador del servo el que se encarga
de convertir ese pulso de anchura variable en una variacion de la
posicion del brazo.
debe
estar en su punto medio (este es el sistema standard pero puede
variar segun la marca del equipo. Por ejemplo en el caso de Futaba
el punto medio coincide con 1,52mS y en el caso de Multiplex corresponde
a 1,6mS). En este sistema el receptor es "tonto" y se limita a convertir
ese tren de impulsos en impulsos separados para los distintos servos;
esto lo hace un componente electronico llamado "registro de desplazamiento",
que tiene una patilla de entrada por la que le llega el tren, y
tantas patillas de salida como canales tengamos, y se encarga de
mandar el 1º pulso al canal nº1, el 2º pulso al canal nº2... y cuando
le llega el impulso de sincronismo se resetea y espera al siguiente
tren. Luego es el circuito controlador del servo el que se encarga
de convertir ese pulso de anchura variable en una variacion de la
posicion del brazo. Este
sistema tiene una ventaja y un inconveniente: La ventaja es que
todo el proceso es muy rapido, asi que mandamos informacion de la
posicion de cada servo unas 50 veces por segundo. El inconveniente
es que es muy vulnerable a las interferencias... Si se nos introduce
un pulso de ruido en un tren de impulsos, por ejemplo entre los
canales 2 y 3, los dos primeros canales serian correctos, al 3º
canal le mandariamos el pulso de ruido, y el resto de canales los
mandariamos desplazados (al servo 4 le mandariamos la informacion
del 3º canal, al servo 5 le mandariamos la informacion del 4º canal...
y asi sucesivamente). Una fraccion de segundo despues llega un tren
de impulsos valido y todos los servos vuelven a su posicion correcta.
Este
sistema tiene una ventaja y un inconveniente: La ventaja es que
todo el proceso es muy rapido, asi que mandamos informacion de la
posicion de cada servo unas 50 veces por segundo. El inconveniente
es que es muy vulnerable a las interferencias... Si se nos introduce
un pulso de ruido en un tren de impulsos, por ejemplo entre los
canales 2 y 3, los dos primeros canales serian correctos, al 3º
canal le mandariamos el pulso de ruido, y el resto de canales los
mandariamos desplazados (al servo 4 le mandariamos la informacion
del 3º canal, al servo 5 le mandariamos la informacion del 4º canal...
y asi sucesivamente). Una fraccion de segundo despues llega un tren
de impulsos valido y todos los servos vuelven a su posicion correcta.