Programación
TEORÍA DE LA PROGRAMACION DE
LAS EMISORAS DE RADIOCONTROL
Con la incorporación del microprocesador a los
equipos de radio, no se ha conseguido todavía a nivel aficionado, que
un avión vuele solo (aunque esto ya es posible profesionalmente) y las
palancas principales siguen siendo eso, «principales», pero sí se han
conseguido una serie de funciones que nos ayudan a hacer más confortable
y ambicioso este hobby que nos absorbe.
De la lectura de estos articulos quizá consideremos
la conveniencia de instalar algún sevo más en nuestro modelo,
añadir alguna función adicional a nuestros canales principales
Aprovechando en la medida justa de nuestras apetencias o necesidades las inmensas
posibilidades que nos of rece la mag nifica radio que hemos adquirido, o bier
aprendamos a elegir en función de nuestros nuevos conocimientos, la radio
que tiene Ic que necesitamos realmente y nos ahorremos el dinero necesario para
comprar aquello que no nos hace falta.
Oportuno es avisar al lector que las opiniones que inevitablemente se vertirán
a continuación pueden ser fruto de los gustos o experiencias del autor
que, aunque avaladas por algunos años de practica del radiocontrol a
todos los niveles y en varias especialidades, no dejan en todo caso de ser personales.
 
 Mezclador. Circuito básico.- Para conseguir
un desarrollo lo mas modular posible de lo que es un circuito de mezcla, observaremos
la figura 1 en la que se representa un circuito de mezcla sin conectar, en ella
se ve que tenemos dos canales de entrada y dos canales de salida hasta el momento
no hay interacción entre ellos. Una acción en E1 provoca la salida
S1 y del mismo modo con el canal 2.
Mezclador. Circuito básico.- Para conseguir
un desarrollo lo mas modular posible de lo que es un circuito de mezcla, observaremos
la figura 1 en la que se representa un circuito de mezcla sin conectar, en ella
se ve que tenemos dos canales de entrada y dos canales de salida hasta el momento
no hay interacción entre ellos. Una acción en E1 provoca la salida
S1 y del mismo modo con el canal 2.
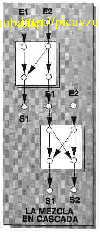
Un circuito básico de mezcla esté constituido por dos canales,
en la figura 2 se representa el caso más simple. Una acción E1
provoca una salida en S1 y en S2, sin embargo una acción en E2 sólo
actúa en S2. Si lacantidad que se mueve en S1 y S2 es igual y del mismo
sentido, se dice que este mezclador es un combi-switch.
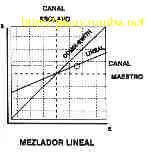
Si la cantidad de movimiento en S2 es una fracción o multiplo de S1 nos
encontramos ante un mezclador lineal. Cuando
la cantidad de movimiento en el canal secundario es siempre en el mismo sentido
aunque el canal primario varie, nuestro mezclador es parabólico.
Para expresar mejor esta párrafo imaginemos un entrenador o velero de
dos canales timan y profundidad. Cuango giramos con la dirección a derechas
necesitamos levantar el elevador una pequeña cantidad para que no nos
caiga y del mismo modo cuando lo hacemos a izquierdas si colocamos un mezclador
parabólico con la dirección como canal primario y la profundidad
como canal secundario, la corrección en viraje será automética
y solo tendremos que maniobrar con la dirección.
Un mezclador lineal o parabólico puede o no tener en cuenta la cantidad
de trim del canal primario y transmitírselo al secundario, esto es necesario
dependiendo de la naturaleza de la mezcla.
Otra característica de un mezclador es la posibilidad de elegir el punto
de embrague (Los aglófonos dicen Offset) ello quiere decir el punto fuera
del neutro de canal primario en el cual esté neutro el canal secundario.
Supongamos un avión que vuela perfec tamente horizontal con el motor
a un terció de gas, que sin embargo se cuelga si se aumenta el gas y
pica si se corta motor. Co tocando un mezclador lineal con un pequeño
porcentaje de mezcla con el gas como canal primario y la profundidad como secundario,
y regristrando el punto de embrague en el punto donde el avión vuela
bien se puede conseguir que el avión vuele horizontal seal cual sea la
cantidad de motor conectada.
 La
mezcla mutua.- En la figura 3 se muestra un mezclador de mezcla mutua,
consiste exactamente en dos mezcladores sencillos, en uno de ellos la entrada
E1 es la principal y la E2 es la secundaria, y en el otro sucede exactamente
al contrario, con lo cual una maniobra de E1 provoca la respuesta de S1 y S2
y asimismo una maniobra de E2 provoca respuesta en S1 y S2, el matiz consiste
en que una de las entradas provoca salidas del mismo signo (los servos giran
paralelos), y la otra provoca salidas de distinto signo (los servos giran en
oposición), este mezclador es el más versátil que existe,
si además tenemos en cuenta que la mezcla puede ser lineal o parabólica,
con el embrague descentrado y con la introducción o no del trim tendremos
un enorme abanico de posibilidades. La
mezcla mutua.- En la figura 3 se muestra un mezclador de mezcla mutua,
consiste exactamente en dos mezcladores sencillos, en uno de ellos la entrada
E1 es la principal y la E2 es la secundaria, y en el otro sucede exactamente
al contrario, con lo cual una maniobra de E1 provoca la respuesta de S1 y S2
y asimismo una maniobra de E2 provoca respuesta en S1 y S2, el matiz consiste
en que una de las entradas provoca salidas del mismo signo (los servos giran
paralelos), y la otra provoca salidas de distinto signo (los servos giran en
oposición), este mezclador es el más versátil que existe,
si además tenemos en cuenta que la mezcla puede ser lineal o parabólica,
con el embrague descentrado y con la introducción o no del trim tendremos
un enorme abanico de posibilidades.
La mezcla en cascada.- La salida de un mezclador
de cualquier tipo puede convertirse en la entrada en otro mezclador y así
sucesivamente mientras las posibilidades de nuestra radio lo permitan, esto
posibilita efectuar mezclas de tres, cuatro o más canales.
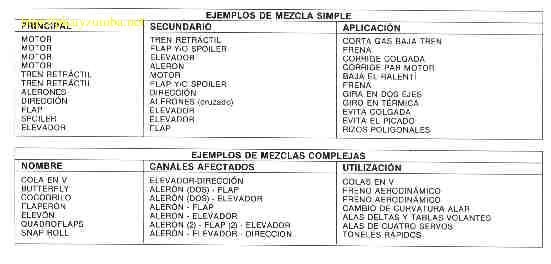
Infinitas posibilidades.- Un mezclador simple
puede utilizarse para un gran número de aplicaciones, corregir los efectos
inducidos por el motor, acoplar la dirección con los alerones, etc. En
la tabla de mezclas simples mostramos una lista no exhaustiva de posibilidades.
 Reguladores
de recorrido (volumen).- Los reguladores de volumen se utilizan para
variar la relación de recorrido entre la entrada al circuito y su salida,
esto tiene muchas aplicaciones siendo la más conocida el Dual Rate.
El dual rate es un regulador de recorrido que se puede conmutar e incluso ajustar
en vuelo, pero este dispositivo no es la única aplicación de los
reguladores de volumen como vamos a comprobar la aplicación mas simple
es como la de la figura 5, la señal aplicada en la entrada es multiplicada
por un factor que puede variar del cero a incluso mas del cien por ciento. Una
variante del regulador de regulador de volumen es aquel en que se pueden aplicar
coeficientes distintos a los valores de entrada positivos o negativos y negativos,
de forma que es posible que se mueva mas en un sentido que en el otro siendo
de hecho la forma de obtener un mando diferencial Reguladores
de recorrido (volumen).- Los reguladores de volumen se utilizan para
variar la relación de recorrido entre la entrada al circuito y su salida,
esto tiene muchas aplicaciones siendo la más conocida el Dual Rate.
El dual rate es un regulador de recorrido que se puede conmutar e incluso ajustar
en vuelo, pero este dispositivo no es la única aplicación de los
reguladores de volumen como vamos a comprobar la aplicación mas simple
es como la de la figura 5, la señal aplicada en la entrada es multiplicada
por un factor que puede variar del cero a incluso mas del cien por ciento. Una
variante del regulador de regulador de volumen es aquel en que se pueden aplicar
coeficientes distintos a los valores de entrada positivos o negativos y negativos,
de forma que es posible que se mueva mas en un sentido que en el otro siendo
de hecho la forma de obtener un mando diferencial
 El
inversor.- Cuando la señal de salida tiene un valor exactamente
igual de la entrada pero de signo contrario, nos encontramos con un regulador
de volumen peculiar al que normalmente llamamos inversor. El
inversor.- Cuando la señal de salida tiene un valor exactamente
igual de la entrada pero de signo contrario, nos encontramos con un regulador
de volumen peculiar al que normalmente llamamos inversor.
El exponencial.- Una aplicación de las
más útiles a nuestro juicio de los reguladores de volumen es el
mando exponencial, estos dispositivos tienen un coeficiente de reducción
que varia con el valor de la entrada siendo sin embargo del 100% en el tope
del mando, el efecto es que podemos conseguir una gran precisión de manejo
en los movimientos pequeños sin renunciar a la total efectividad del
mando cuando esté a tope.
Variantes del regulador exponencial.- Naturalmente,
en el caso del párrafo anterior podríamos aplicar un diferencial
negativo que consiste en darle más sensibilidad al mando en las proximiedades
del neutro, esto resulta practico en modelos exageradamente estables, que se
vuelven inestables fuera del neutro (grandes veleros pesados, por ejemplo).
El regulador de curva exponencial se aplica con curva simétrica como
es el caso de la figura 7 en los canales que corresponden a los tres ejes principales
(alerones, profundidad, dirección), y con curva de recorrido completo
en los mandos sin centro como motor o aerofrenos.
El regulador de curva completa puede en ciertos
equipos trazarse por puntos y conseguir de este modo una ley de recorrido compleja
,lo cual puede tener aplicación, por ejemplo, en el motor de un helicóptero.
Ni que decir tiene que ajustar correctamente una curva de este tipo no esté
al alcance de un piloto que no sepa carburar un motor, saque sus propias conclusiones.
Una mezcla o un regulador pueden necesitar de algún elemento de maniobra
exterior, ya sea para efectuar una conexión o regular una función.
Lo ideal en instalaciones complejas es que los interruptores puedan elegirse
y posicionarse libremente, que no necesitemos potenciómetros de reglaje,
pero que no obstante los podamos instalar durante la fase de puesta a punto
de mezclas y recorridos.
La conmutación automática.- En ciertos
equipos es posible asignar a un mando de canal la función de conmutación
de mezclas o reguladores, esto puede ser útil para provocar automatismos
que realicen funciones de las que nosotros nos podremos despreocupar, concentrando
nuestra atención en el pilotaje. Algunos ejemplos de conmutación
automática pueden ser que baje el ralentí del motor cuando baje
el tren retráctil, que se conecten los aerofrenos cuando el motor está
al ralentí y el tren bajo, y cosas similares
Mezcladores con reguladores.- Como supongo que
se ha podido observar, todos los circuitos que existen hoy en una radio programable
se reducen a los dos tipos expuestos mezclador y regulador. Es la sabia combinación
de ellos lo que hace aflorar toda esa parafernalia de circuitos o mas bien funciones
Iógicas de mezcla compleja, ya sea con varios mezcladores en cascada,
asociados con circuitos de regulación,potenciómetros e interruptores
de activación.
Si tenemos en cuenta que un regulador puede colocarse a la salida de otro regulador,
a la entrada de un mezclador o a su salida o incluso en el circuito interior
de mezcla y que un mezclador así equipado puede acoplarse a la entrada
o salida de otro mezclador o regulador, etc., conseguiremos con una radio de
capacidad suficiente resolver cualquier configuración de vuelo.
Por supuesto, para el noventa y nueve por ciento de las configuraciones habituales,
el fabricante nos facilita preprogramados los circuitos de mezcla y regulación
necesarios, tantos más cuanto mas estemos dispuestos a desembolsar por
nuestro equipo. No obstante estas líneas pretenden que sepamos interpretar
a nivel conceptual lo que sucede en el interior de nuestro emisor y lo que debemos
esperar en nuestro modelo.
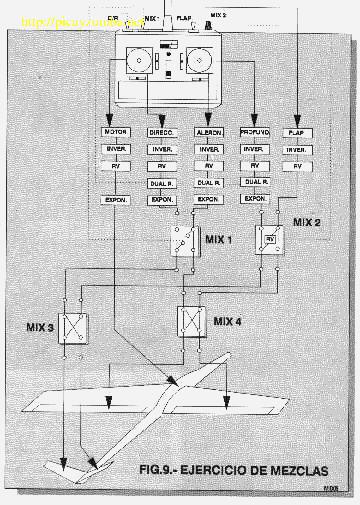
Ejercicio práctico.- En la figura 9 se
representa el circuito ló gico de mezcla para un modelo de avión
con cola en V y flaperones que realiza las si guientes funciones:
Los canales de mando disponen de Dual-Rate
Los cuatro canales principales disponen de exponencial.
Todos los canales disponen de su inversor y regulador de carrera .
El mezclador MIX1 acopla los alerones con la dirección siempre que
actúe sobre el interruptor T1 instalado en el emisor.
El mezclador MIX2 trima la profundidad por medio del regulador RV instalado
en el emisor para que el modelo no se cuelgue al bajar los fiaperones.
El mezclador MIX3 realiza la combinacibn de los dos servos de la cola en V,
sus entradas son por una parte la orden de direccibn que le viene ya mezclada
opcionalmente con alerones desde el mezclador MIX1y por otra la orden de profundidad
trimada desde el mezclador MIX2.
El MIX4 realiza la mezcla de alerones que le llega intacta del MIX1 y los
fiaps que le llegan del MIX2 también limpios por estar ambos canales
en el lado inactivo de los mezcladores simples.
A esta configuración se le pueden añadír algunas funciones
mas sin aumentar el número de servos instalados, por ejemplo:
Frenos de cocodrilo (fiaps hacia arriba, activados por el mando de gas.
Acoplamiento dirección-alerones.
Acoplamiento profundidad-flaps.
Reducción del ralentí al bajar fiaps.
Y puede que algunas otras.
A modo de conclusión Espero que este articulo
sirva para de una parte desmitificar un poco la aparente complejidad de las
modernas, abundantes y variadas radios actuales programables y por otra aprender
a captar de algún modo lo que es grano y lo que es paja, lo que necesitamos
y lo que nos intentan vender. No obstante sepa el lector que el autor esté
esperando la salida al mercado del nuevo supermodelo de una conocida marca,
cargada de funciones que no necesita y con un precio de escándalo,
pero la carne es débil y donde se ponga una buena radio ... BUENOS
VUELOS.
Copyright © por Aeromodelismo RadioControl, Radiocontrol.es Derechos Reservados. Publicado en: 2004-10-28 (30210 Lecturas) [ Volver Atrás ] |