|
| |
Vuelo estabilizado
Teoría y práctica
Vuelo estabilizado
Estabilizadores en modelos de ala fija
El
mundo de los drones.-
Popularmente se conocen a los muticópteros con el nombre genérico
de drones, un dron realmente es cualquier cosa que vuela sin un piloto
a
bordo.
En este mundo se han desarrollado y perfeccionado los estabilizadores
de vuelo para radiocontrol, un estabilizador de vuelo es un
dispositivo complejo compuesto por un microprocesador programado para ,
de una parte entender las señales que le proporciona un receptor de
órdenes procedentes del piloto, de otra para interpretar las señales de
los sensores de estabilización, y finalmente calcular las órdenes que
debe suministrar a cada uno de los motores para mantener la plataforma
en las condiciones de vuelo deseadas, en el caso de un modelo de ala
fija , controlar los servos que lo maniobran.
Entre los sensores que portan estos dispositivos se encuentran
principalmente los giróscopos, que llamamos estabilizadores de tres
ejes, si
incorporan además acelerómetros se dicen de seis ejes que son los
más habituales.
Para realizar funciones adicionales se suelen equipar con
magnetómetros, brújula para entendernos, barómetro, gps, sonar,
transponder y un nunca acabar de posibilidades. |
 |
|
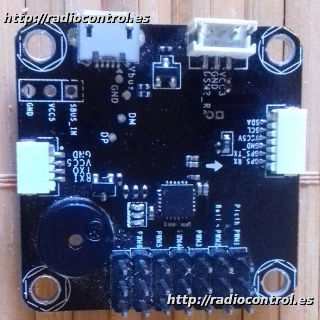
Una
plaquita
de tamaño estandard 30x30 mm. |
|
Algunos términos que entender.-
Los modos.-
Hay una buena colección de términos que se manejan en este mundillo,
comenzaremos por los resultados, los modos de vuelo, se puede
volar manualmente como se ha
hecho siempre, hasta ahora, con estabilización
natural , el piloto no percibe ninguna reacción por parte del
avión y lo controla normalmente pero... vuela mucho, mejor porque la
cajita corrige automáticamente cualquier pequeña perturbación exterior
y trata de mantener actitud y trayectoria sin cambios hasta que percibe
la acción del piloto, con
horizonte el modelo se nivela en el plano horizontal tan pronto
como el piloto suelta las palancas de mando, bloqueado al relajar la acción de
control el modelo permanece en la última posición y la mantiene si es
físicamente posible hasta que el piloto accione de nuevo, este modo es
el utilizado en pilotaje 3D,
el modo ángulo consiste en no
permitir pese a la acción de piloto que el modelo salga de los limites
de actitud que se hayan programado, el modo ángulo es muy útil para
pilotos sin experiencia que tienen tendencia a sobremandar el modelo y
colocarlo en posturas de accidente inmediato, el modo rate limita la velocidad de
maniobra del avión y evita evoluciones bruscas más alla de una
velocidad angular programada.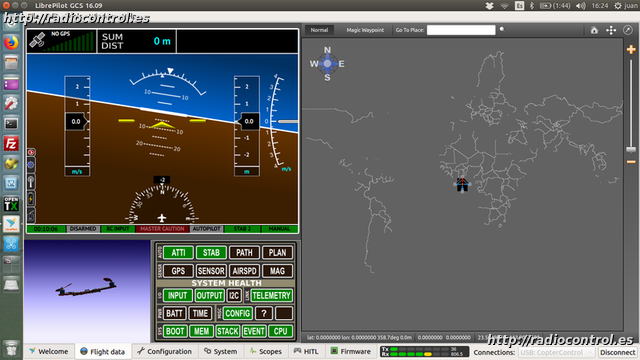
Estos son los modos básicos, existen variantes híbridas y más avanzadas
que permiten otras comodidades, en los programas de configuración de
placas y cajitas os encontrareis con los nombres en inglés de
estos modos y sus variantes.
Un modo muy popular sobre todo entre los prcticantes del vuelo en
primera persona (FPV) es el RTH,
vuelta a casa en castellano que permite al modelo volver de
forma autónoma al punto de salida.
No siempre deseamos volar con e mismo modo, en algunos casos sería
hasta peligroso, por ello dedicamos uno o varios canales de la radio a
seleccionar varios modos diferentes para el momento de vuelo que
estemos realizando.
Los PID .- Es el acrónimo
de
Proporcional, Integral y Derivative, la
teoría de estabilización es muy compleja y aparte de sobrepasar el
objetivo de este artículo, sobrepasan sobre todo los conocimientos del
autor, si os puede ayudar, no obstante el saber que estas constantes se
usan en el algoritmo de estabilización, de forma que el modelo responda
correctamente a las pertubaciones, el valor debe de ser alto pero si se
sobrepasa produce oscilaciones indeseables en el modelo.
Simplificando la cuestión,
Proporcional es la respuesta a la perturbación presente, Integral es la respuesta a la
perturbación pasada y Derivative es a respuesta a la
perturbación futura.
Los programas de configuración permiten modificar estas constantes pero
afortunadamente para nosotros proponen unos valores estándard para cada
placa que nos facilitan enormemente las cosas, asimismo estas variables
se pueden modificar en vuelo, ya sea mediante diferentes modos o
mediante un canal de ganancia adicional que puede controlar estos
valores, generalmente los tres a la vez.
|
Presentación
comercial de los diferentes estabilizadores.-
Estos dispositivos se presentan o bien en cajitas lista
para su uso con algunos switches y
potenciómetros de reglaje, o bien en cajita y con un
terminal de pantalla si son mas sofisticados, pero lo más
habitual procedente del mundo de los multicópteros son las
plaquitas cuadradas de 30 mm de lado con o sin caja. Estas últimas se
empiezan a cualificar por la potencia del procesador y vamos por las
F4, se supone que la vieja y honorable multiwii seria una F1, la CC3D
sería una F2, las F3 son las que tienen una frecuencia de proceso
de 70MHz, y las F4 las de 170MHz.
El firmware.- Es el software, el
programa, que controla el sistema, se carga en el microprocesador y se
adapta a la instalación de sensores, entradas y salidas específicas de
cada estabilizador, generalmente el fabricante de la plaquita nos
ofrece
un firmware precargado determinado. |

Un estabilizador "de
cajita" el
Hobby Eagle
|
Los
programas de configuración.- Con
la excepción de algunas placas comerciales que se manejan con programas
de configuración "propietarios" la mayoria de placas y programas son
"open source" y son los que a nosotros realmente nos interesan. Entre
los más conocidos están BetaFlight, CLeanflight, Inav, Libre
Pilot, cada
uno de ellos controla una familia de plaquitas
determinada y ofrece firmwares compilados para cada una de ellas,
generalmente más modernos que los precargados por razones obvias.
Prácticamente sin excepcion estos estabilizadores llevan un puerto USB
del tipo teléfono para permitir su programación y configuración. |
Receptores, configuraciones de control.-
Los receptores han utilizado desde la época vintage la modulacion de
pulsos posicionales, consiste básicamente en un señal en forma de tren
de dientes rectangulares que corresponde cada uno a un canal, el
receptor los separa y dirige cada uno a su servo correspondiente. Si
cada uno de estos canales los conectamos cada uno con un cable en la
placa estabilizadora tenemos lo que se llama una entrada PMW
Pero los receptores pueden suministrarnos la onda completa por un solo
cable y a eso le llamamos una entrada PPM.
Existe una forma mucho más moderna de suministrar a información a la
placa estabilizadora, que es el SBUS, la información llega a la tarjeta
en forma de información digital, canal-valor, canal-valor....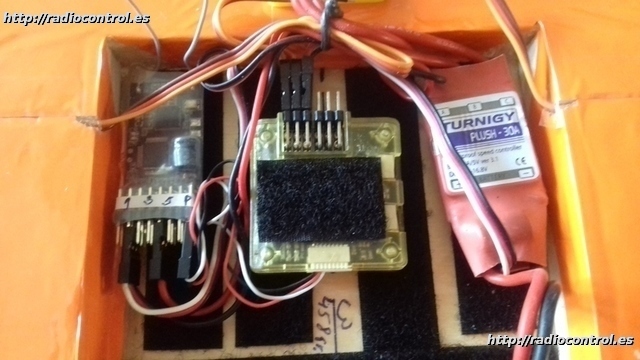
Prácticamente todas las placas estabilizadoras son capaces de recibir
las entradas de estas tres maneras y alguna variante más de estas.
Lógicamente son preferibles por simplicidad de instalación las
conexiones de un solo hilo, y en casos de querer gran rendimiento la
opción preferible es el SBUS.
PMW, traducido: modulación
por
ancho de pulso
Este ancho de pulso es el que el receptor recibe de una forma u otra
para cada canal y que suministra de cualquier forma a nuestra
plaquita, tiene unos valores estandard que conviene recordar:
máximo 2.000 microsegundos, minimo 1.000, neutro 1.500, no
todas las radios respetan estos valores , conviene
ajustarlos , sobre todo el neutro debe conseguirse ya sea con trim o
subtrim lo más exacto posible
Canal de emisor, canal de
receptor, canal de entrada, canal de salida.-
No nos confundadmos decir canal es genérico y por ello impreciso y
abocado a errores. El canal del emisor y el receptor suelen coincidir
aunque no siempre.
El canal de entrada es el que se establece entre receptor y placa
estabilizadora, suele llamarse por su función, roll=alerón,
pitch=elevador, yaw=dirección (alabeo, cabeceo y guiñada en ortodoxo).
Cada canal de salida se conecta a cada servo o al regulador del motor
eléctrico en su caso. |
|
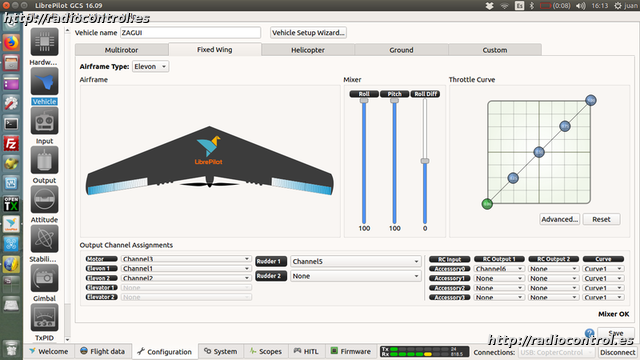
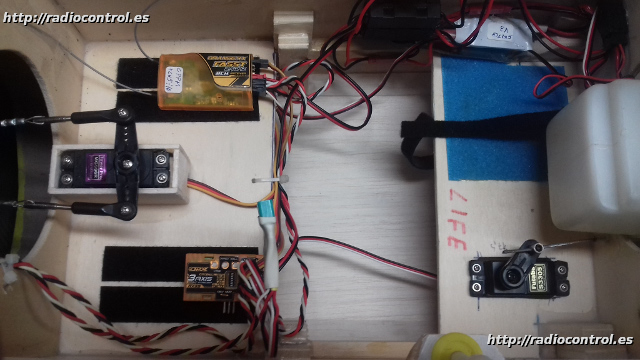
Un caso práctico REAL.- Tenemos
un
ala volante muy popular, la Zagi motorizada con con unos 200W que es
una
potencia bastante alta para este tamaño de 1200 mm. la hemos
equipado con material muy asequible una tarjeta CC3d con caja y un
receptor con salida PMW y PPM, estos materiales son muy
asequibles, si los preferís mas costosos hay opciones, el
programa de configuración sera LibrePilot.
Antes de instalar el
estabilizador
hay que asegurarse de que nuestro modelo vuele correctamente en
condiciones normales, estabilizar algo que vuela mal puede llevar a
resultados impredecibles y peligrosos.
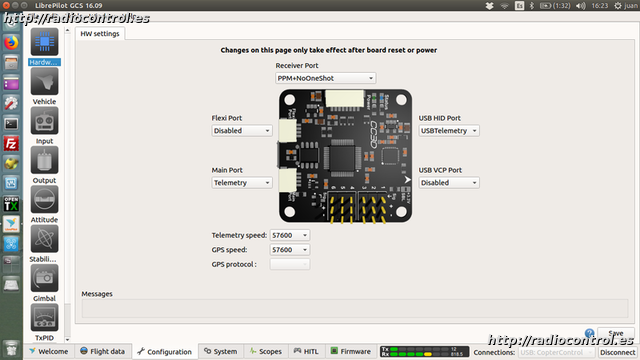
Para configurar, se requiere el receptor conectado por su salida PPM
conectado al canal de entrada 1 de la CC3D, por ello en la pantalla de
harware elegimos la opción PPM+noOneShot (One shot es una opción
especial en multicópteros)
Por razones prácticas conviene respetar las
configuraciones
por
defecto, la placa debe colocarse en sentido de vuelo y horizontal,
aunque se podria colocar en cualquier posición, los canales
preconfigurados deben respetarse, todo ello nos ahorrará esfuerzos
mentales a la hora de configurar el sistema.
Todos los programas de configuración tienen un Wizard , un asistente
para preconfigurar el modelo que necesitemos.
Para alas volantes, el LibrePilot permite elegir libremente cada canal de salida
pero es obligado definirlos aunque no se usen, es el caso de la
dirección, si no se define no nos deja salvar la configuración,
con
nuestra configuración y ya que el receptor lo
permite conectamos el motor al canal 1 del receptor, hacerlo a través
de la placa no nos aporta ninguna ventaja y sí alguna molestia, así que
lo conectamos directamente al receptor.
|
 |
 |
 |
Acontinuación en los
reglajes
de amplitud y neutro de los canales de entrada, lo más importante fijar
el neutro en 1.500 microsegundos.
Fijamos también que canal va a controlar los modos de vuelo, en este
caso con un interruptor de tres posiciones especificamos tres modos que
serán Rattitude (Natural+horizonte), manual y Axis Lock (Bloqueadol) |
 |
Las posiciones del canal
de modo se corresponden con un modo de vuelo,
los modos se corresponden con un banco de variables y a su vez con una
configuración de estabilidad concreta para cada eje, las posibilidades
son mareantes, para un vuelo básico se puede siimplificar bastante como
se ha hecho en este caso práctico.
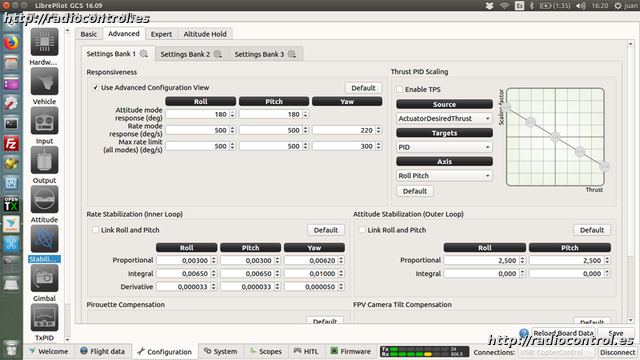
Aquí se ajustan los famosos PID.
|
 |
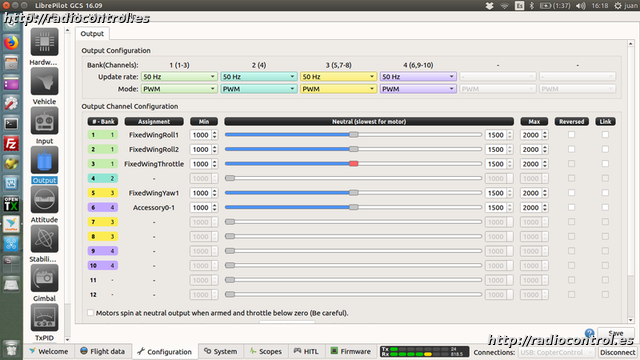
| Reglajes
de
los canales de salida hacia los servos, los valores normales son
1.000/1.500/2.000 microsegundos |
|
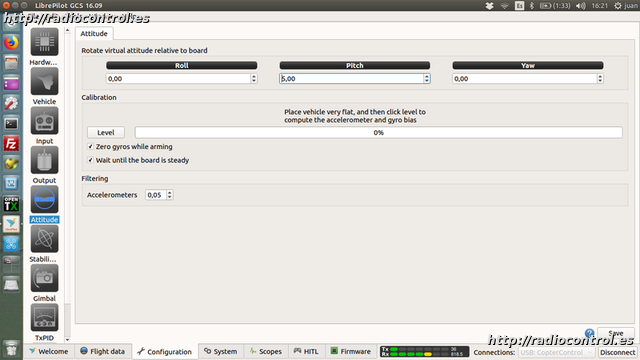
| Attitude es el horizonte
virtual
que queremos en nuestro modelo,
generalmente volara con un cierto ángulo de ataque , en nuestro
caso
5º , el estabilizador se podría colocar en cualquier posisión
especificando aquí el ángulo de montaje. |
 |
Chequeo
prevuelo.- En modo manual comprobamos que las superficies
de control se mueven en la dirección correcta.
En configuración de horizonte (Attitude en la CC3D) comprobamos que los
giros aportan la correcion correcta, si se levanta un plano el alerón
de ese lado debe subir , si se levanta el morro los dos alerones deben
de bajar, si no fuese así es que no hemos colocado la placa en la
posisión correcta o no hemos hecho correctamente el paso anterior.
Yo suelo lanzar la zagi en modo de bloqueado para asegurarme la
trayectoria de lanzamiento y una vez en vuelo la paso a modo horizonte,
es curioso como nos acostumbramos rápidamente a lo cómodo, el modelo
puede alejarse pero asegurada la horizontalidad el riesgo de accidente
se reduce enormemente.
Otra comodidad que aporta el estabiliador es que evita que el modelo se
cuelgue excesivamente cuando va con el motor empujando ya que compensa
el exceso de sustentación producida por la velocidad al picar
automáticamente la zagi.
En la imagen de la configuración de los PID nosotros hemos subido los
valores por defecto un 50% y los rates, la velocidad de respuesta en
alabeo y profundidad del orden del 300% para asegurarnos que el ala va
a evolucionar con toda su potencia de mando, que no es excesiva con los
alerones que lleva de 40 mm. de cuerda.
Con la ganancia que hemos marcado el ala vibra algo en alta
velocidad, habría que bajarla algo pero preferimos mantenerla ya
que en a velocidad va perfecta, se podrían sofisticar los reglajes,
pero nadie es perfecto
Las reacciones de un modelo estabilizado de esta manera pueden
sorprendernos al principio pero, no os engañeis, es un avance, permite
hacer todo lo que sabemos y aporta un confort nuevo al vuelo, tan es
así que nosotros ya montamos en casi todos los proyectos nuevos
algún tipo de estabilizador. |
Otras opciones.-
Las cajitas estabilizadoras.-
Existen al menos una decena de estos estabilizadores con distintas
prestaciones, los mas comunes y económicos son los de tres ejes, estos
aportan estabilidad natural, se suelen ajustar con potenciómetros
incorporados y algunos interruptores de configuración ya que pueden
usarse en las distintas configuraciones habituales de nuestros modelos
, doble alerón, cola en V y ala delta.
Una de las más sofisticadas
es la Hobby Eagle, su modelo alto de gama soporta estabilidad de seis
ejes, y casi todos los modos conocidos, con una programación
simplificada mediante una pantallita de campo, y una gui específica de
ordenador naturalmente.
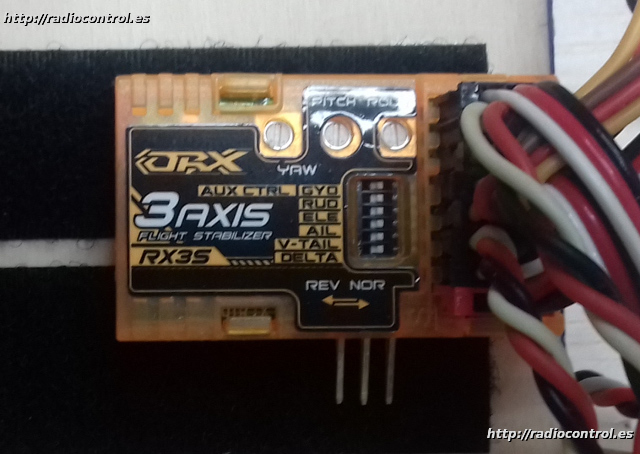
Una de las más sencillas y
económicas es la Orange RX3S, de tres ejes, no es la única pero para
nosotros tiene un valor especial porque es una de las plataformas del
proyecto Open Flight Stabilizer,
aeromodelistas con los conocimientos y ganas suficientes han
reprogramado esta tarjeta para hacerla espécifica para modelos de 3D,
no vamos a abordar este tema pero si teneis interés y algunos
conocimientos de electrónica lo podreis encontrar perfectamente
documentado en GitHub.
Nosotros usamos esta plataforma en nuestros modelos acrobáticos desde
corchitos a gasolinas, para modelos grandes hasta digamos 50 c.c.
es suficiente reforzar el bus de corriente, para modelos mayores
será necesario conectar el estabilizador a una centralita. |
 |
 |
 |
 |
-o-O-o-
Copyright © por Aeromodelismo RadioControl, Radiocontrol.es Derechos Reservados. Publicado en: 2018-02-08 (9925 Lecturas) [ Volver Atrás ] |
|
| |
|
Conectarse
|
¿Todavía no tienes una cuenta? Puedes crearte una.
Revisamos todas las peticiones, por lo que la confirmación puede tardar un poco en recibirse . |
|
|
¿ Quienes estamos ?
|
Actualmente hay 60 invitados, 0 miembro(s) conectado(s).
Eres un usuario anónimo. Puedes registrarte aquí |
|
|
Articulos anteriores
|
| Martes, 18 diciembre 2012 | | · | Telemetría, los datos al alcance de la mano |
| Viernes, 14 septiembre 2012 | | · | Memorias de África. Un biplano de sport |
| Viernes, 10 junio 2011 | | · | Un servo interesante (Recomendación retirada) |
| Martes, 04 enero 2011 | | · | Aeromodelismo profesional |
| Jueves, 18 noviembre 2010 | | · | Sistema bidireccional FrSky 2.4GHz |
| Martes, 28 septiembre 2010 | | · | Motores de gasolina cada vez más pequeños |
| Miércoles, 11 agosto 2010 | | · | Motores de reacción .- Las turbinas de gas |
| Domingo, 07 marzo 2010 | | · | FUTABA .- Los menús secretos. |
| Viernes, 19 febrero 2010 | | · | Un motovelero de bolsillo |
| Sábado, 26 septiembre 2009 | | · | 15 aniversaro de Aerotec |
Artículos archivados
|
|
|
|